
")

Τα υποβρύχια (Υ/Β) που έλαβαν μέρος στους δύο παγκόσμιους πολέμους ήταν ουσιαστικά σκάφη επιφανείας με δυνατότητες υποθαλάσσιας πλεύσης για περιορισμένα χρονικά διαστήματα.
Συνήθως χρησιμοποιούσαν τη δυνατότητά τους αυτή στην τελική φάση της προσέγγισης ενός στόχου και στη φάση της διαφυγής μετά την επίθεση. Κύρια αποστολή τους ήταν η παρενόχληση των θαλασσίων συγκοινωνιών και λιγότερες ήταν οι περιπτώσεις που χρησιμοποιήθηκαν εναντίον πολεμικών επιφανείας.
Η υποβρύχια κίνηση επιτυγχανόταν με τη χρήση μπαταριών. Το γεγονός αυτός υπέβαλε τα Υ/Β σε σημαντικούς περιορισμούς σε ότι αφορά την ταχύτητα και την ικανότητα ελιγμών, κυρίως όμως τα ανάγκαζε να αναδύονται σε τακτά χρονικά διαστήματα. Ο λόγος ήταν απλός, οι μπαταρίες έπρεπε να φορτιστούν με τη λειτουργία του ντηζελοκινητήρα, ο οποίος απαιτούσε οξυγόνο για να λειτουργήσει. Παράλληλα βέβαια χρειαζόταν και η ανανέωση των αποθεμάτων οξυγόνου για τη συντήρηση των πληρωμάτων και ο καθαρισμός της ατμόσφαιρας του Υ/Β από το διοξείδιο του άνθρακα.
Τα Υ/Β στο 2ο Παγκόσμιο Πόλεμο
Αρχικά, το κυνήγι των Υ/Β γινόταν με τη χρήση της πρώτης μορφής ενεργού sonar που ονομαζόταν ASDIC από τα αρχικά των λέξεων Allied Submarine Detection Investigation Committee. Όμως η συγκεκριμένη διάταξη ήταν βραχείας εμβέλειας και η κύρια αξιοποίησή της ήταν στην καταδίωξη ενός ήδη αναγνωρισμένου υποβρύχιου στόχου. Η μεταστροφή της κατάστασης στον πόλεμο του Ατλαντικού έγινε δυνατή χάρις στη χρησιμοποίηση αεροσκαφών μεγάλης ακτίνας δράσης, εξοπλισμένων με ραντάρ και με κύριο στόχο τον εντοπισμό του ίχνους των υποβρυχίων καθώς το μεγαλύτερο χρονικό διάστημα πλεύσης τους ήταν σε κατάσταση ανάδυσης.
 |
| Darkone / CC BY-SA 2.0, via wikimedia commons |
Παράλληλα, για πρώτη φορά στην ιστορία του πολέμου, πρωταρχικό ρόλο έπαιξε η συλλογή ηλεκτρονικών πληροφοριών (Electronic Intelligence - ELINT). Τα Γερμανικά Υ/Β είχαν συχνή επικοινωνία με τις βάσεις τους για την ενημέρωσή τους σχετικά με τις νηοπομπές-στόχους, αλλά και το συντονισμό της δράσης των ομάδων υποβρυχίων. Η υποκλοπή αυτών των επικοινωνιών αρχικά έδινε μια ένδειξη για την ευρύτερη περιοχή στην οποία βρισκόντουσαν τα Υ/Β (Direction Finding - DF), ενώ το σπάσιμο των κωδικών enigma από ένα σημείο και έπειτα επέτρεπε στους συμμάχους να διαβάζουν και το περιεχόμενο των μηνυμάτων.
Προς το τέλος του πολέμου άρχισαν να εμφανίζονται αρκετές ενδιαφέρουσες καινοτομίες στη σχεδίαση των υποβρυχίων. Ο τύπος XXI εισήγαγε την καινοτομία του snorkel (αναπνευστήρας), μιας διάταξης απορρόφησης ατμοσφαιρικού αέρα, απαραίτητου για τη λειτουργία του ντηζελοκινητήρα, ενώ το Υ/Β έπλεε σε βάθος περισκοπίου. Το μικρότερο ίχνος του snorkel στα ραντάρ σε σχέση με το ίχνος ενός Υ/Β σε ανάδυση δυσκόλεψε σημαντικά τον ανθυποβρυχιακό πόλεμο. Παράλληλα ο ίδιος τύπος Υ/Β έφερε μεγαλύτερες μπαταρίες που του εξασφάλιζαν μεγαλύτερη αυτονομία και, σε συνδυασμό με ένα βελτιωμένο υδροδυναμικό σχήμα, μεγαλύτερη ευελιξία και ταχύτητα. Τα εξοπλισμένα με snorkel υποβρύχια ήταν σαφώς ανώτερα των προηγουμένων, όμως διατηρούσαν και πάλι μια στενή σχέση εξάρτησης με την επιφάνεια της θάλασσας.
Η έννοια του πραγματικού Υ/Β προσεγγίστηκε ακόμα περισσότερο με ένα πραγματικά επαναστατικό τύπο Υ/Β ο οποίος όμως ουσιαστικά δεν εισήλθε στον πόλεμο. Επρόκειτο για τον τύπο XXIV Walther, ο οποίος χρησιμοποιούσε υπεροξείδιο του υδρογόνου ως οξειδωτικό καύσης και εξασφάλιζε στο Υ/Β πολύ μεγαλύτερη αυτονομία σε ότι αφορά την αναγκαιότητα ανάδυσης.
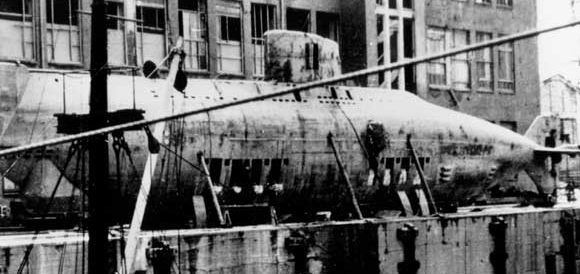 |
| U.S. Navy / Public Domain |
Αμέσως μετά τον πόλεμο
Οι πρώτες μεταπολεμικές τεχνολογικές εξελίξεις ήταν ουσιαστικά ο απόηχος του πολέμου και η ενσωμάτωση των Γερμανικών εξελίξεων στα Υ/Β των Αμερικανών και Σοβιετικών. Η ύπαρξη υποβρυχίων που κινούνταν κοντά, αλλά όχι πάνω από την επιφάνεια, χρησιμοποιώντας ντηζελοκινητήρες, χάρις στο snorkel, εισήγαγε μια νέα παράμετρο. Μέχρι την εμφάνιση του snorkel, ένα υποβρύχιο σε κατάδυση χρησιμοποιούσε τις μπαταρίες του παράγοντας ελάχιστο θόρυβο, ενώ όταν λειτουργούσε ο ντηζελοκινητήρας το Υ/Β βρισκόταν στην επιφάνεια και μεγάλο μέρος του θορύβου χανόταν στην ατμόσφαιρα ή αναμιγνυόταν με τους ήχους επιφανείας. Όταν όμως ένα Υ/Β χρησιμοποιούσε το snorkel για κινηθεί με ταχύτητα (κατάσταση η οποία χαρακτήριζε μεγάλο μέρος της επιχειρησιακής ζωής του σκάφους), όλος ο θόρυβος από τη λειτουργία του ντηζελοκινητήρα διαχεόταν στο νερό. Παράλληλα η πλεύση σε υψηλές ταχύτητες κοντά στην επιφάνεια δημιουργούσε έντονα φαινόμενα σπηλαίωσης.
Το εύκολο και άμεσο συμπέρασμα ήταν ότι σε αυτή τη νέα εποχή τα "μάτια" του υποβρυχίου δεν ήταν πλέον το περισκόπιο, αλλά τα συστήματα που θα "άκουγαν" τους ήχους των σκαφών επιφανείας, αλλά και άλλων υποβρυχίων. Ταυτόχρονα άρχισε να διαφαίνεται ότι το καλύτερο όπλο για την αντιμετώπιση των υποβρυχίων ήταν κυρίως τα ίδια τα υποβρύχια και δευτερευόντος τα ανθυποβρυχιακά σκάφη επιφανείας.
Έτσι αναπτύχθηκαν οι μέθοδοι παθητικού ακουστικού εντοπισμού, δηλαδή ο εντοπισμός ενός Υ/Β από το θόρυβο που παράγουν τα μηχανικά μέρη του συστήματος πρόωσης και όλες οι υπόλοιπες λειτουργίες, ενώ βρίσκεται σε κατάδυση. Τη ίδια χρονική περίοδο ανεξάρτητες έρευνες έδιναν αρκετές σημαντικές πληροφορίες για τη μετάδοση του ήχου μέσα στη θάλασσα, όπως την ύπαρξη σε μεγάλο βάθος ενός καναλιού που μεταφέρει ήχους χαμηλών συχνοτήτων σε πολύ μεγάλες αποστάσεις.
Παραγωγή και συμπεριφορά θορύβου
Οι βασικότερες πηγές θορύβου σε ένα Υ/Β είναι:
– ήχοι από το σύστημα παραγωγής και μεταφοράς ενέργειας οι οποίοι διαχέονται από το κέλυφος στο νερό προς όλες τις κατευθύνσεις
– ήχοι από την προπέλα, αλλά και το νερό που την περιβάλλει, λόγω σπηλαίωσης
– από το ίδιο το κέλυφος, σε περιπτώσεις τυρβώδους ροής του νερού γύρω από αυτό
Το μοντέλο μετάδοσης του ήχου εξαρτάται τόσο από την πηγή, δηλαδή τα αρχικά χαρακτηριστικά του (συχνότητα, ένταση κλπ), όσο και από τις φυσικές συνθήκες του νερού (θερμοκρασία, περιεκτικότητα σε αλάτι κλπ).
Κάτω από την επιφάνεια του νερού μπορεί κανείς να συναντήσει μια σειρά ήχων οι οποίοι προέρχονται από διάφορες πηγές και συνιστούν το θόρυβο περιβάλλοντος (ambient noise):
– από τα κύματα στην επιφάνεια της θάλασσας. Ο θόρυβος από τις καιρικές συνθήκες επιφανείας βρίσκεται κατά κανόνα στις συχνότητες άνω των 300Hz
– από την «κίνηση» στην ευρύτερη περιοχή. Σε περιοχές με μεγάλη κυκλοφορία πλοίων υπάρχει σημαντική αύξηση του θορύβου περιβάλλοντος στις συχνότητες κάτω από τα 300Hz.
– βιολογικός θόρυβος από είδη θαλάσσιας ζωής (φάλαινες, δελφίνια, γαρίδες κλπ)
Ένας άλλος παράγοντας που εισέρχεται στη λειτουργία συστημάτων παθητικού ηχοεντοπισμού είναι ο θόρυβος της ίδιας της πλατφόρμας-φορέα του παθητικού sonar. Μπορεί να οφείλεται είτε σε μηχανικούς θορύβους είτε στη ροή του νερού γύρω από το ίδιο το sonar.
Οι κυριότερες πηγές θορύβου σε ένα Υ/Β σε κανονικές συνθήκες πλεύσης είναι η προπέλες και οι άξονές τους, η ροή νερού γύρω από το σκάφος, οι μηχανικοί ήχοι από αντλίες, κινητήρες, ηλεκτρογεννήτριες κλπ και ο θόρυβος λόγω σπηλαίωσης. Σπηλαίωση είναι το φαινόμενο που εμφανίζεται στις προπέλες ενός σκάφους όταν λόγω της περιστροφικής κίνησης της πτερωτής και της διαφοράς πίεσης που δημιουργείται, παράγονται φυσαλίδες αέρα. Το φαινόμενο είναι αρκετά όμοιο με εκείνο του βρασμού, ενώ χαρακτηρίζεται και από την εμφάνιση θορύβου στη φάση της κατάρρευσης των φυσαλίδων. Η σχέση μεγέθους της πτερωτής και ρυθμού περιστροφής του άξονα, μαζί με τις φυσικές συνθήκες θερμοκρασίας και πίεσης είναι οι κύριοι παράμετροι που ορίζουν το κατώφλι εμφάνισης και ανάπτυξης του φαινομένου της σπηλαίωσης.Ο τελευταίος είναι και ο ισχυρότερος θόρυβος που αναμένεται να παράγει ένα Υ/Β υπό κανονικές συνθήκες. Το φαινόμενο της σπηλαίωσης, η ροή νερού, οι θόρυβοι των αξόνων μετάδοσης κίνησης και των περισσοτέρων συστημάτων πρόωσης ανήκουν στην κατηγορία των πηγών θορύβου ευρέως φάσματος καθώς οι ήχοι που παράγουν εκτείνονται σε ένα ευρύ φάσμα συχνοτήτων. Αντίθετα οι πηγές μηχανικού θορύβου χαρακτηρίζονται ως στενού φάσματος καθώς δίνουν σήματα σε συγκεκριμένη περιοχή συχνοτήτων.
Τα Σοβιετικά Υ/Β ήταν κατά κανόνα πολύ πιο θορυβώδη από τα Αμερικανικά, κυρίως λόγω των μηχανικών τμημάτων του αντιδραστήρα (αντλίες ανακυκλοφορίας νερού) και λόγω μεγαλύτερου θορύβου από το σύστημα πρόωσης. Παράλληλα μέχρι τα μέσα της δεκαετίας του 70 δεν είχε δοθεί ιδιαίτερη έμφαση στις τεχνικές ηχομόνωσης. Χρειάστηκε να φτάσουν τα τέλη της δεκαετίας του 80 ώστε να επέλθει μια ισορροπία στα επίπεδα εκπεμπόμενου θορύβου ανάμεσα στους δύο στόλους Υ/Β, αν και τα Αμερικανικά Υ/Β είχαν από καιρό υιοθετήσει τη χρήση συστήματος κυκλοφορίας του νερού με φυσική συναγωγή.
Η παραγωγή θορύβου είναι και εκείνη που ορίζει τη επιχειρησιακή, ή τακτική ταχύτητα ενός Υ/Β. Πρόκειται για την τιμή εκείνη της ταχύτητας με την οποία ένα Υ/Β εξακολουθεί να παραμένει αρκετά «ήσυχο» ώστε να διαφεύγει τον εντοπισμό. Είναι δηλαδή ένα όριο, η υπέρβαση του οποίου αυξάνει σημαντικά τις πιθανότητες εντοπισμού.
Οι δύο βασικότερες παράμετροι που παίζουν ρόλο στη μετάδοση του ήχου στο νερό είναι η διαφορές πίεσης και θερμοκρασίας, που σε μεγάλο βαθμό μεταφράζονται σε διαφορές βάθους. Η θερμοκρασία ελαττώνεται όσο αυξάνεται το βάθος μέχρι περίπου τα 500m μετά τα οποία η θερμοκρασία είναι κατά κανόνα σταθερή στον 1ο C. Παράλληλα η αύξηση της πίεσης με την αύξηση του βάθους προκαλεί αύξηση της ταχύτητας του ήχου κατά 1,7m/s κάθε 100m βάθους. Διακρίνονται έτσι ουσιαστικά δύο περιοχές. Στη πρώτη (επιφανειακό στρώμα), κοντά στην επιφάνεια, ρυθμίζουσα παράμετρος για τη μεταβολή της ταχύτητας του ήχου είναι η διαφορά θερμοκρασίας. Ανάλογα με το θερμοκρασιακό προφίλ το οποίο επηρεάζεται σε μεγάλο βαθμό από τις συνθήκες στην επιφάνεια αλλά και τις κλιματολογικές και άλλες ιδιαιτερότητες της κάθε περιοχής, είναι δυνατό να υπάρχει αύξηση ή μείωση της ταχύτητας του ήχου. Στη δεύτερη (ισόθερμη περιοχή) ρυθμίζουσα παράμετρος είναι η αύξηση της πίεσης και άρα η αύξηση της ταχύτητας του ήχου. Τέλος υπάρχει και μια ενδιάμεση ζώνη οποία συνδέει τις δύο προηγούμενες.
Η γραφική παράσταση της ταχύτητας ενός ηχητικού κύματος ως συνάρτηση του βάθους δίνει το προφίλ της ταχύτητας του ήχου (SVP). Έτσι τελικά η πιθανότητα εντοπισμού ενός Υ/Β εξαρτάται κυρίως από το SVP, την αρχική ένταση του θορύβου, το βάθος στο οποίο βρίσκεται ο πυθμένας, τις ακουστικές και αναλυτικές δυνατότητες του παθητικού sonar και των υπολογιστών που το υποστηρίζουν και σε ένα βαθμό, πολύ μικρό πλέον, από τις ικανότητες του χειριστή.
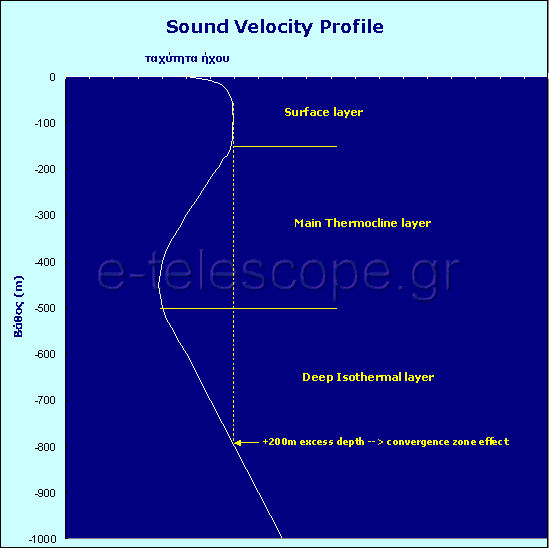 |
| K. Delimpasis / CC BY-NC 4.0 |
Ένα πολύ ενδιαφέρον φαινόμενο είναι εκείνο των ζωνών σύγκλισης (convergence zone effect). Το φαινόμενο αυτό εμφανίζεται όταν ο πυθμένας της θάλασσας βρίσκεται σε βάθος μεγαλύτερο τουλάχιστο κατά 200 m από το σημείο που ορίζεται γραφικά στο σχήμα. Στην περίπτωση αυτή το ηχητικό κύμα αντί απλά να ταξιδέψει μεγάλες αποστάσεις στο βαθύ κανάλι ανακλώμενο ανάμεσα στον πυθμένα και το όριο της ισόθερμης περιοχής, διαγράφει τόξο και επανέρχεται σε μικρά βάθη, αλλά σε συγκεκριμένες αποστάσεις (συνήθως κάθε 50-70 ναυτικά μίλια). Η κίνηση αυτή έχει βηματικό χαρακτήρα, δηλαδή είναι δυνατός ο εντοπισμός του θορύβου σε απόσταση 60nm (1η ζώνη σύγκλισης), 120nm (2η ζώνη σύγκλισης) κοκ.
Η συμπεριφορά του ήχου μέσα στο νερό αποτελεί αντικείμενο μεγάλης ανάλυσης. Στην παρούσα παράγραφο έγινε μια συνοπτική και αρκετά απλουστευμένη παρουσίαση για την εξυπηρέτηση των αναγκών του άρθρου.
Οι μέθοδοι ηχοεντοπισμού
Οι διατάξεις παθητικού ηχοεντοπισμού πέρασαν από πολλά στάδια εξέλιξης ενώ αναπτύχθηκαν και εφαρμόστηκαν πολύπλοκα μαθηματικά μοντέλα για την ανάλυση και ερμηνεία των σημάτων. Η βασική κατεύθυνση εξέλιξης ήταν η προσπάθεια αύξησης του λόγου σήματος προς θόρυβο. Για το σκοπό αυτό προφανώς χρησιμοποιήθηκαν σε τεράστιο βαθμό οι δυνατότητες των ηλεκτρονικών υπολογιστών και αφιερώθηκαν εκατομμύρια εργατώρες στην ανάπτυξη λογισμικού.
Σταδιακά οι ΗΠΑ ανέπτυξαν ένα εκτεταμένο δίκτυο μόνιμα τοποθετημένων υδροφώνων στο βυθό της θάλασσας το οποίο παρείχε μόνιμα, αν και όχι απόλυτα αξιόπιστες πληροφορίες, για τις κινήσεις των Σοβιετικών υποβρυχίων. Το δίκτυο αυτό παραμένει σε λειτουργία και σήμερα και είναι γνωστό με το ακρωνύμιο SOSUS (Sound Surveillance System). Το SOSUS είναι το σύστημα εντοπισμού μεγάλων αποστάσεων. Για τον εντοπισμό υποβρυχίων σε μέσες αποστάσεις χρησιμοποιούνται κυρίως διατάξεις παθητικών sonar σε υποβρύχια, σκάφη επιφανείας και αεροσκάφη. Σε ότι αφορά τα ανθυποβρυχιακά ελικόπτερα τα sonar κρέμονται από καλώδιο το οποίο εκτείνεται από το ελικόπτερο μέχρι τη θάλασσα. Η διάταξη αυτή (ρυμουλκούμενο sonar) χρησιμοποιείται και από υποβρύχια και σκάφη επιφανείας με στόχο τη βελτίωση της απόδοσης σε σχέση με τα φερόμενα στο κύτος sonar τα οποία επηρεάζονται ως ένα βαθμό από τις κινήσεις του σκάφους-φορέα.
Ο εντοπισμός σε μικρές αποστάσεις, που είναι στην ουσία ο οριστικός χωρικός προσδιορισμός ενός Υ/Β πριν την τελική επίθεση εναντίον του, επιτυγχάνεται με ενεργά sonar στην περίπτωση άλλων Υ/Β και σκαφών επιφανείας και μέσω της διασποράς ηχοβολιστικών σημαντήρων από ελικόπτερα ή ανθυποβρυχιακά αεροπλάνα. Τέλος μία ακόμα μέθοδος η οποία χρησιμοποιείται από αεροσκάφη στη φάση της τελικής προσβολής είναι η ανίχνευση μαγνητικών ανωμαλιών (MAD). Πρέπει βέβαια να σημειωθεί ότι η ανάπτυξη τορπιλών που φέρουν το δικό τους ενεργό sonar επιτρέπει την εξαπόλυση της τελικής επίθεσης χωρίς τη χρησιμοποίηση ενεργού sonar από το φορέα.
Η πυρηνική ενέργεια
Η χρήση της πυρηνικής ενέργειας ως μέσου πρόωσης άνοιξε μια νέα εποχή και παράλληλα δημιούργησε το πραγματικό Υ/Β. Η επίσημη αυλαία αυτής της εποχής άνοιξε τον Ιανουάριο του 1955 όταν το USS Nautilus έγινε το 1ο πυρηνικό Υ/Β. Οι πρώτες εκτιμήσεις των επιχειρησιακών του δυνατοτήτων ανέφεραν ότι «ήταν αδύνατο να εντοπισθεί από ραντάρ καθώς δεν χρειαζόταν να αναδύεται ή να χρησιμοποιεί snorkel, ήταν τόσο γρήγορο ώστε το ενεργό sonar δεν μπορούσε να εστιάσει πάνω του, ενώ η ταχύτητα και η ευελιξία του επέτρεπαν να αποφεύγει με ευκολία επιθέσεις εναντίον του με τορπίλες». Από την άλλη πλευρά όμως ήταν θορυβώδες, καθώς οι αντλίες κυκλοφορίας του νερού ψύξης του αντιδραστήρα έδιναν σημαντικό θόρυβο στις χαμηλές συχνότητες, όπως επίσης και οι μειωτήρες στροφών του άξονα που μετέδιδε την κίνηση από τον ατμοστρόβιλο στις προπέλες.
Ήταν λοιπόν προφανές ότι το βάρος της ανθυποβρυχιακής προσπάθειας έπρεπε να στραφεί στις μεθόδους παθητικού ηχοεντοπισμού, ενώ αντίστοιχα η εξέλιξη των Υ/Β έπρεπε να έχει ως κύριο άξονα τη μείωση του παραγόμενου θορύβου. Αυτός ο φαύλος κύκλος έμελλε να είναι η κεντρική ιδέα των εξελίξεων μέχρι σήμερα.
Δείτε τη συνέχεια της έρευνας του e-telescope.gr: Το αληθινό υποβρύχιο
Δείτε τη σειρά άρθρων-έρευνα για τα Πυρηνικά Υποβρύχια
Ο πόλεμος της σιωπής
Οι βασικές αρχές στην εξέλιξη των υποβρυχίων
Το αληθινό υποβρύχιο
Τα πυρηνικά υποβρύχια στον Ψυχρό Πόλεμο
Ατυχήματα πυρηνικών υποβρυχίων
Πυρηνοκίνητα σκάφη & περιβάλλον
 Ο Κωστής Δελήμπασης γεννήθηκε το 1971 στη Λάρισα. Είναι απόφοιτος του τμήματος Χημικών Μηχανικών της Πολυτεχνικής Σχολής του Α.Π.Θ. και ασκεί το επάγγελμα του Χημικού Μηχανικού από το 1996, με κύρια αντικείμενα περιβαλλοντικά έργα και μελέτες, διαχείριση βιομηχανικής επικινδυνότητας και εκτάκτων καταστάσεων και project management επενδυτικών σχεδίων και τεχνικών έργων.
Ο Κωστής Δελήμπασης γεννήθηκε το 1971 στη Λάρισα. Είναι απόφοιτος του τμήματος Χημικών Μηχανικών της Πολυτεχνικής Σχολής του Α.Π.Θ. και ασκεί το επάγγελμα του Χημικού Μηχανικού από το 1996, με κύρια αντικείμενα περιβαλλοντικά έργα και μελέτες, διαχείριση βιομηχανικής επικινδυνότητας και εκτάκτων καταστάσεων και project management επενδυτικών σχεδίων και τεχνικών έργων.