
")

During the two world wars of the 20th century, submarines were essentially surface ships with the ability to sail underwater for short periods. Usually they used their underwater capabilities during the final approach to their target and their escape afterwards. Their main mission was the sea-denial to merchant shipping. Operations against surface warships were only occasionally conducted and were an exception rather than a rule.
Propulsion was achieved through a combination of a diesel engine (surface operations) and a set of batteries (underwater propulsion). This resulted in restrictions regarding their speed and manoeuvrability, and forced submarines to surface in order to recharge their batteries. The reason was simple enough: the batteries charged through the operation of the diesel motor, which required oxygen. There was also the need to renew the oxygen reserves for human consumption and to vent carbon dioxide.
Submarines in World War II
At the beginning of World War II, the hunting of submarines was conducted with the use of the first form of active sonar, named ASDIC from the words Allied Submarine Detection Investigation Committee. ASDIC had a very short range and its main use was hunting a submarine that had already been detected, or suspected to be present, after an attack or the visual detection of a periscope.
The turning point of the submarine operations in the Atlantic was the use of long-range maritime patrol aircraft equipped with radar to detect German U-boats sailing on the surface. U-boats sailed on the surface while transiting to and from their patrol areas, or during their patrols and submerged only to approach and execute attacks.
 |
| Darkone / CC BY-SA 2.0, via wikimedia commons |
During that period, for the first time in the history of war, the collection of electronic information (Electronic Intelligence - ELINT) started playing a a fundamental role. The German U-Boats had frequent communications with their bases for updates on mission orders, convoy routes and the co-ordination of wolfpacks (groups of submarines). Monitoring the electronic signatures of these communications gave bearing indications on a submarine (Direction Finding - DF), while the breaking of the enigma codes revealed the content of the messages.
Toward the end of the war the German Navy presented several interesting innovations in submarines design. Type XXI introduced the snorkel, a tube used to inhale atmospheric air while the submarine was at periscope depth, thus allowing the use of the more powerful diesel engine instead of the batteries. Compared to a fully surfaced submarine snorkels presented a much smaller trace for radars and considerably complicated Allied anti-submarine operations. Additionally, Type XXI was fitted with more capacious batteries ensuring enhanced autonomy in depths below periscope depth, and had an improved hydrodynamic form resulting in better manoeuvrability and increased maximum speed. Snorkel equipped submarines were an important improvement in terms of survivability and operational capabilities but remained uncomfortably depended on the surface of the sea.
The notion of the real submarine became apparent with a really revolutionary type that actually did not become operational during the war. Type XXIV Walther boats were designed to carry hydrogen peroxide as an oxidizer for combustion thus cancelling the need to surface or remain at snorkelling depth with a raised snorkel mast and achieved much higher submerged speed.
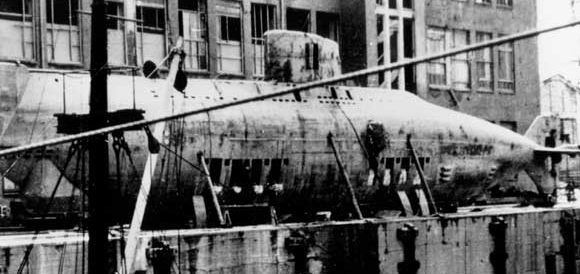 |
| U.S. Navy / Public Domain |
After the war
The first post-war developments were basically the incorporation of German engineering in U.S. and Soviet submarine design. The use of snorkels from submarines that operated near but not on the surface using their diesel engines introduced a new parameter in antisubmarine operations. Until the appearance of the snorkel a submerged submarine used its batteries and thus the noise produced was actually minimal. When a submarine was surfaced, using its diesel engines a lot of noise was created but a significant part of it was dispersed in the atmosphere and blended in all other surface sounds. But now, when a submarine was snorkelling the diesel engines were operating under the surface and the noise produced propagated in the water. Additionally, the higher speeds achieved begun to create cavitation phenomena.
The use of the snorkel and the above-mentioned side effects pointed out that noise was the submarine’s new enemy and would become the focus of anti-submarine operations. A submarine’s emitted noise was the best way to detect her presence, even from medium and long ranges.
But sound detection and monitoring also worked for the submarines, allowing them to track surface vessels without the need of constantly using their periscope and becoming exposed. Another emerging concept was that the best anti-submarine platform was actually another submarine, since her passive sensors were less affected by surface noise, she could “listen” at variable depths and could theoretically perform detection and tracking without the opponent being aware.
Independent oceanographic research projects produced important data concerning the transmission and behaviour of sound below the sea surface, among them the existence of a “deep sound channel” that propagates low frequency sounds in great distances. Finally, the gradual evolution of computing machines, would speed the processing of sound data, allowing their operational use.
The result was that underwater warfare shifted towards passive acoustic detection and submarines became the primary hunters of the enemy submarines.
Noise production and transmission
The most important noise/sound sources in a submarine are:
- sounds from the propulsion system diffused in the water to all directions
- sounds from the propeller and the surrounding water due to cavitation
- sounds dew to turbulent flow of water around the submarine’s hull
The sound transmission model depends on the source and the initial characteristics (frequency etc), the depth where the sounds are produced and the depth at which they are monitored and the environmental conditions (temperature, salinity etc).
There is also a variety of sounds present underwater, emanating from environmental conditions on the surface and biological activity (marine life) in the water. These noises are referred to as ambient noise.
Another important consideration in terms of passive sound detection is the sound created by the monitoring platform, referred to as self-noise. Self-noise values depend on the speed that the monitoring platform is travelling with and the actual noise emitted by its machinery..
A submarine’s main sources of noise are the propellers and their shafts, the flow of water around the hull, the operation of various mechanical components (pumps etc) and cavitation phenomena. Cavitation noise is produced from the motion of turning propellers and the subsequent pressure difference. Depending on the size of the propeller, the rotation speed, water pressure and temperature there is a threshold for the creation of air bubbles. When the bubbles begin to collapse because of the water pressure they produce a sound like a pulsed note that can be detected in considerable distances.
Cavitation noise is a broadband noise with the frequencies produced covering a wide spectrum, while mechanical noises are narrowband noises as they radiate on or around specific frequencies.
Soviet submarines were much noisier than the American ones, mainly because of the mechanical components of the nuclear reactor (usually the water recirculation pumps). Also because until the mid 1970’s the Soviet Navy had not focused on sound-proofing design concepts. Only during the 1980’s the U.S. and Soviet submarines reached a relative parity in terms of sound emission, although U.S. submarines had already replaced cooling water recirculation pumps with natural convection systems.
Noise production is the factor that determines a submarine’s tactical speed, the speed with which the submarine is quiet enough to avoid detection. Actually it is a speed limit above which the possibility of detection increases significantly.
The two main parameters that govern sound propagation in the water are pressure and temperature differences, which largely translate into differences in depth. Temperature decreases as depth increases to approximately 500m, after which the temperature is normally constant at 1°C. Similarly, pressure increase with depth causes an increase of the speed of sound at 1,7m/s every 100m of depth. These conditions define the following regions/layers:
In the first (surface layer), near the surface, the regulating parameter for the change of sound speed is the temperature gradient. Depending on the temperature profile, which is greatly influenced by the surface conditions and the climatic and other local particularities, there may be an increase or decrease of the sound speed.
In the second (isothermal region) the regulating parameter is pressure, and as it increases so does the speed of sound.
Finally there is an intermediate zone which connects the previous two, the main thermocline layer.
The graphic representation of the speed of a sound wave as a function of depth, gives the Sound Velocity Profile (SVP) that is representative of a specific sea area at a given time. The probability of detecting a submarine depends mainly on the SVP, the initial intensity and frequency of the noise, the depth of the sea floor, the filtering and computing capabilities of the passive sonar system and, in a lesser degree, the operator skills.
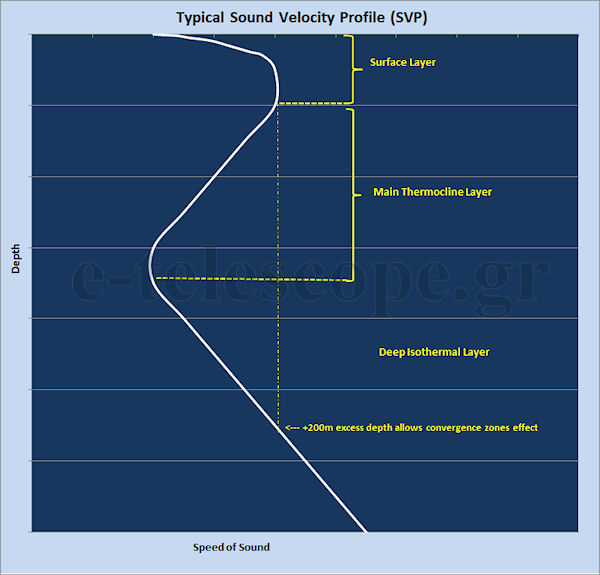 |
| K. Delimpasis / CC BY-NC 4.0 |
A very interesting phenomenon is the convergence zone effect. This phenomenon occurs when the sea floor is deeper than at least 200 m from the point defined graphically in the SVP. In this case the sound wave instead of simply traveling long distances in the deep channel reflecting between the sea bottom and the boundary of the isothermal region, it doesn’t reflect on the bottom but bends to an arc, returning to the surface, usually at a distance of 50 to 70 nautical miles. It is possible to have multiple convergence zones, which will occur at regular intervals. For example, if the first convergence zone is at 30 nm, the second would be at 60 nm. The convergence zone is only a few miles wide, and therefore contacts acquired through convergence zones tend to appear and disappear quickly.
Sound propagation in the water is a subject of further analysis. This is only a simplified and brief presentation serving the needs of this article.
Sound detection methods and equipment
After it became evident that passive sound detection would be the decisive factor in submarine and anti-submarine operations for the 2nd half of the 20th century and beyond, passive sonar systems evolved continuously in terms of sensitivity, and complex mathematical models were developed for the analysis and interpretation of signals. The main focus was the attempt to increase the signal to noise ratio. Super-computers and millions of man-hours devoted to software development were and still are used to this goal.
The U.S. Navy developed an extensive network of hydrophones, permanently mounted on the seabed, which provided continuous, though not always entirely reliable information, on the movements of Soviet submarines. The network remains in operation today and is known by the acronym SOSUS (Sound Surveillance System). The SOSUS detection system is mainly a long range detection system. Tactical engagement acoustic data still have to be provided, and used, by submarines, surface vessels and aircraft.
Anti-submarine helicopters use acoustics sensors that are submerged with a cable. Submarines have hydrophones mounted on their hull (sonar dome and on the sides). Both submarines and ships also use sets of hydrophones on a trailing wire (towed sonar). This setup is used to minimize the platform’s own noise interference and also to monitor the blind area in a submarine’s baffles which cannot be covered from hull-mounted hydrophones. Anti-submarine aircraft, helicopters and ships also use autonomous sonar buoys (active and passive) to saturate an area and thus localize and trap an enemy submarine.
All the data collected by the various passive acoustic sensors generate what is essentially an educated guess on a submarine’s position, speed, heading and depth. In a submarine vs submarine engagement the firing solution provided by the target motion analysis (TMA) can be fed to a torpedo in order to guide the weapon close in enough to the target for its own active sonar to execute the final attack run. Active sonar for the pin-pointing of the target is used by ships and helicopters. Submarines tend to avoid using their powerful active sonars, since it exposes them to any enemy platforms in the area. Finally another method which is used by aircraft in the final attack run is the magnetic anomaly detection (MAD) which detects the existence of a large ferrous object creating a local distortion of earth’s magnetic field.
Submarine warfare incorporates more real time science analysis than any other form of modern warfare.
Nuclear propulsion
The applications of nuclear energy for propulsion lead to a new era and the creation of the true submarine. The official beginning of this era was in January 1955 when the USS Nautilus became the 1st nuclear powered submarine. Early estimates of her operational capabilities reported that "… She was hard to find because she never had to snorkel and so fast that active sonars couldn't keep their beams focused on her. Her speed and three dimensional manoeuvrability also allowed her to simply outrun existing homing torpedoes…" On the other hand, however, she was noisy, as the cooling water circulation pumps of the reactor gave significant noise at the low frequencies, as well as the shaft gears that transmitted the movement from the steam turbine to the propellers.
It was therefore obvious that the weight of the anti-submarine effort had to be shifted towards passive sonar methods, while the development of new submarine types would devote significant effort in the reduction of the generated noise. This vicious cycle was to be the central concept of submarine development and operations from the 1950s until today.
See the next chapter of the series: The true submarine
See the entire series of articles on nuclear submarines
The silent war
Basic concepts in submarines' evolution
The true submarine
Nuclear submarines in the Cold War
Nuclear submarines accidents (coming soon)
Nuclear propulsion and the environment (coming soon)
